随着高新技术的快速发展,无线遥 控玩具生产厂家为了节能,降低成本,顺应市场的需要,生产出品种繁多、小巧玲珑的遥控玩具汽车,深受孩子们的喜欢。这些微型遥控玩具汽车的电路工作原理是大同小异的, 为了减小遥控玩具汽车的体积,一般 采用微型驱动直流伺服电动机,内部电路板上焊接的元件大部分为小型贴 片式,其中核心元件遥控专用集成电 路TX-2/RX-2也是采用贴片式专用芯 片。该芯片是一对专用于遥控车模的 CMOS大规模集成电路。该集成电路 具有5种控制功能,即前进、后退、加速、左转、右转等。它能组成具有五 路红外遥控或无线电遥控等功能的独 立控制电路,可对遥控玩具汽车、各 种家用电器及照明灯等进行遥控。
TX-2/RX-2配套遥控集成块具有 以下特点:(1)采 用CM0S工艺制造, 静态功耗小,外围 元件少,电源电压适用范围宽(V CC= 2.0~5.0V),工作稳 定可靠 。( 2 ) 具有五路独立遥控开关控制功能。由于遥控发射集成电路 可输出带载波的编 码信号及不带载波 的编码信号两种输 出信号,所以它与 相应的射频电路配 合,不仅可实现五路独立的无线电遥 控,而且还可方便地实现五路独立的红外遥控。(3)TX—2具有自动关机功能,既便于遥控发射器的设计,又可节能。(4)利用多片TX—2与多片RX—2 并接,可方便地实现多路(5的倍乘数)遥控。
本人通过维修玩具遥控汽车,测绘出一款微型无线遥控玩具汽车的发射及充电电路工作原理图,并实测出该无线遥控玩具汽车发射及接收电路所用集成块TX-2/RX-2的各引脚电压及在路电阻,如表1、表2所示,下面简述其工作原理和检修方法。
一、遥控发射及充电电路工作原理
1、遥控发射电路该遥控发射电路主要以集成块IC1 (TX-2BS)为核心及其他元件组成, 其工作原理如图1所示。集成块IC1的 3、11脚为电源供应端;其1、16脚为 左右转弯控制信号输入端;4、5脚为 前进和后退控制信号输入端;6脚为 加速控制信号输入端;7、8、9脚为 空端;10、12脚为编码信号控制输出 端;13、14脚外接振荡电阻。三极管 VT2及晶体B1等构成载波振荡器,其振荡频率为35MHz。
在接通电源后,操作遥控器中的 功能键,其集成块IC1相应控制脚接 地,内部对应的功能选通,开始进行 编码产生与操作功能键相一致的编码 信号,然后由其10脚输出控制编码脉 冲信号,同时其12脚输出高电平控制 信号,发射二极管LED亮,三极管VT2的B极有高电平信号而导通工作,三极 管VT2与晶体振荡器B1组成的载波振荡 器工作,产生35MHz的振荡载波频率, 经电容C3耦合到三极管VT1的B极。当 集成块IC1(TX-2BS)的10脚输出高 电平控制编码脉冲信号时,三极管VT1 导通工作,其功能控制编码脉冲信号 及三极管VT2及晶体振荡器B1产生的 35MHz载波经三极管VT1调制放大后, 经电容C6、电感L3耦合发射出去。
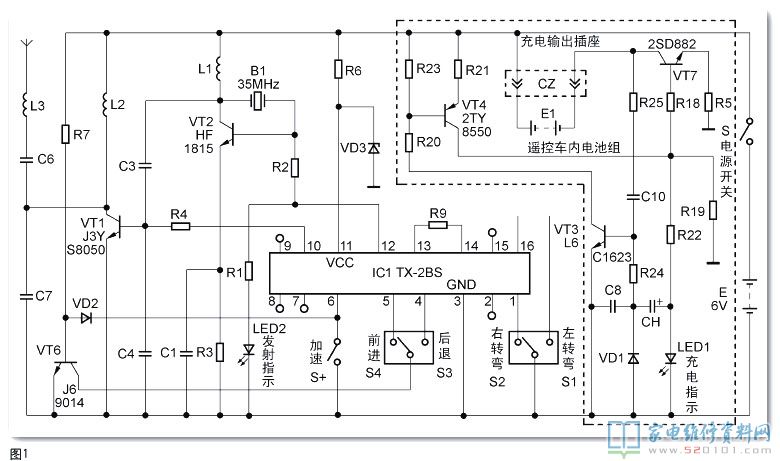


2. 遥控车充电电路
由于微型无线遥控车其自身较小,没有空间安装5号电池,生产厂家就采用三节纽扣电池串联使用。当遥控车没有电时,就把遥控手柄中的插头插入遥控车的插座充电即可使用,其充电电路工作原理见图1中虚线部分。
当微型车无电,把遥控手柄中的 插头插入遥控车后,遥控器内的+6V电 压通过连接插座进入到遥控车充电电 路,该电压加到三极管VT7的C极;同 时还通过电阻R21,电阻R23加到三极 管VT4的B极和E极;通过电阻R20、电 阻R25、电容C10加到三极管VT3的B极 和C极。由于电容C10两端电压瞬间不 能突变,就给三极管VT3的B极提供一 定的偏置导通电压,三极管VT3导通, 其C极电位降低,三极管VT4的B极电位 降低而导通,+6V电压经过三极管VT4 的E、C极,电阻R18加到三极管VT7的 B极,三极管VT7导通,开始给遥控车 内电池组充电;同时,该电压经电阻R22给电容CH充电,充电指示灯LED1 亮。在电容CH充电时,又给三极管VT3 的B极提供了一定的偏压,从而加速了 三极管VT3、VT4、VT7的导通,随后电 容的充电电流越来越小,三极管VT3、 VT4、VT7相应进入截止状态,充电指 示灯LED1灭,表明给遥控车内电池组 充电结束。
二、遥控接收电路工作原理
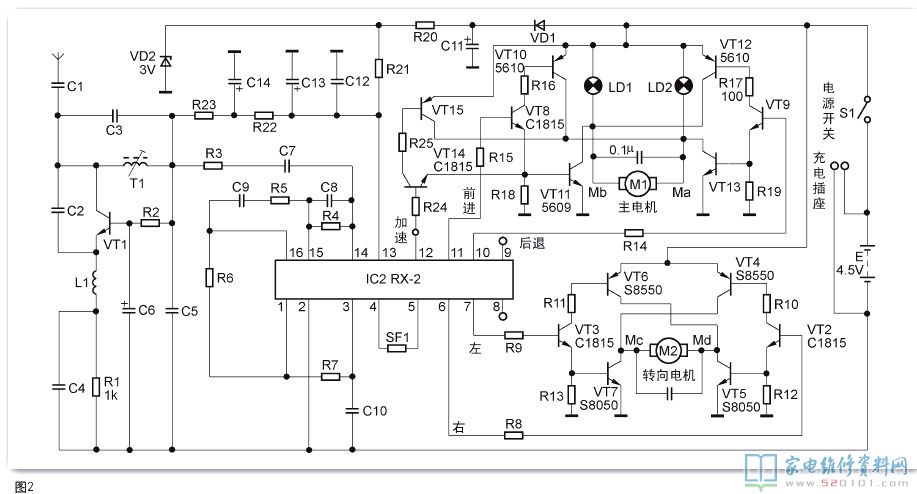
该遥控接收电路主要以集成块IC2 (RX-2)为核心及其他元件组成,其 工作原理见图2所示。 当操作遥控器上的各功能键时, 所发出的高频信号经遥控车上的天线 接收后,由超再生接收电路解调出编 码控制脉冲信号,再经电阻R3、电 容C7耦合,送到接收集成块IC2的14 脚,经其内部放大处理后,从其相应 控制端输出控制信号,送到电机驱动 控制电路。电动机驱动电路都是采用 双端平衡方式,改变其两端工作电压 极性,就可控制电动机转动方向。当 输出的是前进信号时,集成块IC2的11 脚输出高电平控制信号,三极管VT8、 VT10、VT11随之导通,电动机M1正 转,遥控车前进。当输出后退,左右 转向控制信号时,用户可自已分析电 路原理。
三、常见故障与检修
本文列举的都是消费者自己能动手检修的小故障,如表3所示。

网友评论